FABCAMP2015に参加してきました!【その2】
こんにちは、スタッフの飯島です。 今回は、FABCAMPで参加した「Making Exiii Workshop」というオープンソースの筋電義手HACKberry(ハックベリー)をつくるワークショップについて紹介したいと思います。
HACKberryはExiiiというベンチャー企業が開発している筋電義手です。筋電義手は、筋肉の電気信号を受信し直感的に操作できる義手のことで、すでに商品化はされていますが、 ①非常に高価(150万円以上)・② ユーザ自身で修理・カスタマイズすることが困難(=維持費がかかる)・③デザインの選択肢が少ないなどといった問題をもっています。
しかし、HACKberryは製品自体の設計データを公開しているオープンソースハードウェアであるのが最大の特徴です。材料を集めれば誰でも筋電義手を安価に手に入れることができます。
[筋電義手についての紹介動画]
この義手は3Dプリンタで出力したパーツとCNCミリングマシンで削り出した電子基板で作られているので、ファブラボの機材といくつかのパーツを揃えればつくることができます。
このワークショップを担当していたのは、FablabJapan発起人である、慶應義塾大学環境情報学部准教授の田中浩也先生でした。
ワークショップでは、すでに組み立てられているものを一度すべて分解して、観察しながら再構築するということをしました。
下の写真は、Hackberryを一部分解したものです。黒い部分はすべて3Dプリンタで出力したパーツです。

分解するにあたり、新しく3Dプリントしたものと交換して組み上げようとしたのですが、3Dプリンタの性能によってパーツ自体の精度が落ちてしまい、なかなか組み立てるだけでも難しい作業でした。
こちらは実際に、FABCAMPの時間内で3Dプリントしたものです。
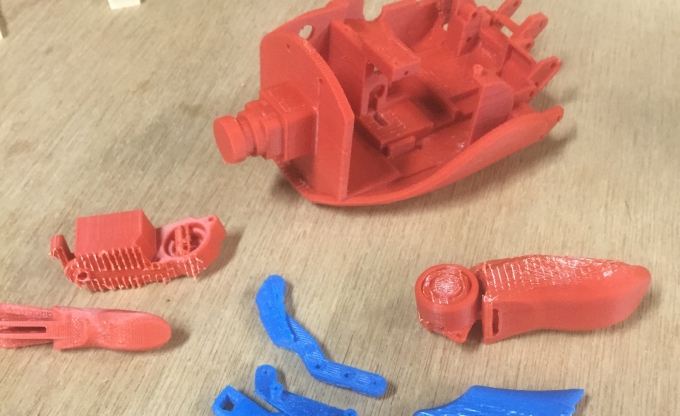
小さいパーツは特にギザギザした粗が目立ってしまっています。オープンソースで誰でもデータを自由にダウンロードしてつくれるといっても、品質の限界など安価な3Dプリンタの課題はまだありそうです。
今回、僕が個人的に発見できたのは、オープンソースであることが「もののしくみ」を学ぶ教材になるということでした。
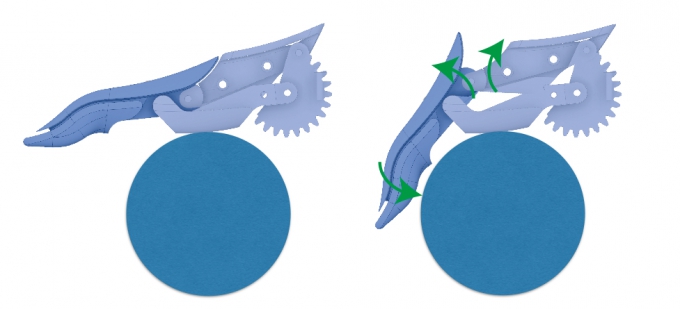
下の写真は、このHACKberryがものを握る仕組みを調べ、それを図にまとめたものです。
3Dデータは、設計図です。パーツ同士がどのように組み立てられているのか知ることができます。
下の写真は、3Dソフト上でデータを開いている画像です。3Dソフト上では、パーツごとに分解したりすることができます。
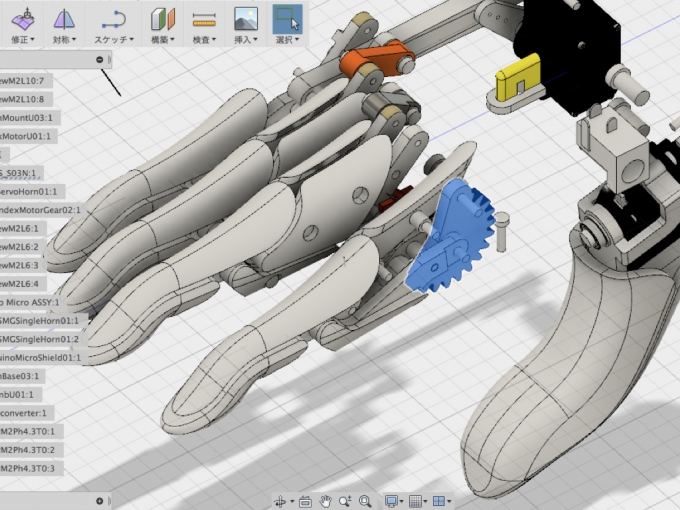
実物を分解しているだけでは、どういう仕組みになっているか分かりにくかったのですが、こうしてデータ上で確認することによって「機械のしくみ」を理解することができました。
データがオープンであれば、学習にも使うことができるというのは、個人的に新たな発見でした。

最後に、このワークショップを通してオープンソースというものについて考えることができたのは、共に議論し、試行錯誤しながら作業を進めた他の参加者の方がいたからでもあります。
こういった、ものを通じた会話によって人と繋がり、新たな発見をすることは、ファブラボならではの素晴らしいコミュニケーションだと思いました。
![]()